Contactez-nous
Contactez-nous

Avec ses quelques 33 000 km de lignes, SNCF assure la gestion d’un des réseaux ferrés les plus importants d’Europe. Ce patrimoine nécessite une maintenance et un entretien sans faille afin de garantir la sécurité des équipements, du personnel et des voyageurs. C’est pourquoi SNCF effectue quotidiennement à l’échelle du réseau des opérations d’inspection et de surveillance des installations.
Le suivi et la maîtrise du couvert végétal représentent le deuxième poste de coût de maintenance, atteignant plusieurs dizaines de millions d'euros de dépenses annuelles. Les enjeux économiques, sociaux, sécuritaires et écologiques de la maîtrise de la végétation sont considérables (retards de trains, risques d’accidents, etc.). C’est pourquoi SNCF s’est fixé l'objectif d'atteindre l’excellence opérationnelle en matière de maîtrise du couvert végétal.
L'usage de drones se présente comme une solution efficace, car il permet une grande souplesse d’intervention, sans perturbation du trafic ferroviaire. Ces aéronefs télépilotés qui peuvent embarquer un large panel de capteurs permettent des mesures par photogrammétrie, caméras thermiques et multi spectrales, ou encore LiDAR ( Light Detection And Ranging).
Conscient des possibilités offertes par la récente émergence des drones, SNCF Réseau a mis en place dès 2014 un pôle dédié aux drones, chargé de missions d’inspections, de cartographie et de surveillance des installations du Réseau Ferré National (RFN). La photogrammétrie jusqu’alors utilisée pour répondre aux besoins présente des limites importantes, notamment en matière de mesures sous le couvert végétal. La technologie LiDAR, configurée sur des vecteurs drones, apparait alors comme une solution très prometteuse. Dans cette perspective, le Pôle Drones de SNCF Réseau a récemment fait l’acquisition d’un système LiDAR hautement performant, constitué d’un scanner laser Riegl VUX1-UAV, et d’une centrale inertielle Applanix AP20 (Figure 1). Cette solution a pour but la cartographie du risque végétation dans les emprises ferroviaires. Pour y parvenir, il sera nécessaire de quantifier la qualité des données acquises par le système LiDAR, établir une méthodologie de classification de ces données et définir des processus de traitement pour détecter les lieux où le couvert végétal présente un danger pour les infrastructures ferroviaires.
Cette solution a pour but la cartographie du risque végétation dans les emprises ferroviaires. Pour y parvenir, il sera nécessaire de quantifier la qualité des données acquises par le système LiDAR, établir une méthodologie de classification de ces données et définir des processus de traitement pour détecter les lieux où le couvert végétal présente un danger pour les infrastructures ferroviaires.
À terme, ces travaux devront permettre d’anticiper les incidents Végétation, d'optimiser les missions d'élagage sur le terrain, et donc de réduire considérablement les coûts de maintenance.
1. Etude de précision et d’exactitude du système LiDAR
Afin d’exploiter les données provenant de tout système de mesure, il est indispensable d’estimer quantitativement leur qualité. Cette étape est primordiale pour déterminer la précision des livrables, mais également pour optimiser les processus d’intervention terrain. Afin d’apprécier la qualité des nuages de points issus du système LiDAR, nous avons analysé l’ensemble des traitements qui permettent de les générer.
- Post-traitement des données trajectographiques
Le post-traitement des données trajectographiques permet de calculer précisément la trajectoire du drone à partir des données GNSS et inertielles mesurées en vol, ainsi que des observations du Réseau GNSS Permanent (RGP). La trajectoire ainsi calculée a une précision de l’ordre de 2 centimètres. - Calibration du système LiDAR
Dans les traitements de données lasergrammétriques acquises par voie aérienne, la calibration vise à déterminer le désaxement entre le repère de la centrale inertielle et celui du drone. Pour se faire, la solution développée par Riegl se base sur la mise en correspondance de plans détectés dans différentes bandes de scan. Les valeurs calculées sont les trois angles de calibration (roulis, tangage et lacet) qui minimisent, au sens des moindres carrés, les écarts entre les plans détectés et appariés. Les tests réalisés ont permis d’établir un protocole précis d’acquisition terrain afin d’obtenir des valeurs fiables de calibration, valeurs indispensables pour la fourniture d’un nuage de point de qualité.
- Amélioration de la trajectoire
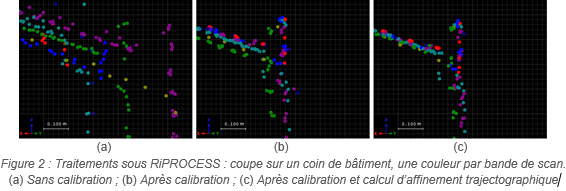
L’incertitude sur la trajectoire post-traitée se propage directement dans le nuage de points lors de sa création. Ainsi, au sein d’une même zone couverte par différentes bandes de scans, nous pouvons constater des décalages de plusieurs centimètres dans le nuage. Ce calcul d’amélioration trajectographique (implémenté dans l’algorithme RiPRECISION) se base sur l’utilisation de points de contrôles (préalablement pointés), et de primitives géométriques automatiquement détectées dans les nuages. Des corrections angulaires et tridimensionnelles sont appliquées tout au long de la trajectoire améliorant ainsi les précisions relatives et absolues du nuage (Figure 2).
Les différents modèles de calculs d’amélioration de la trajectoire proposés par l’algorithme ont été testés, et la précision des nuages de points obtenus quantifiée, afin de valider un processus de calcul.
- Configuration des points de calage
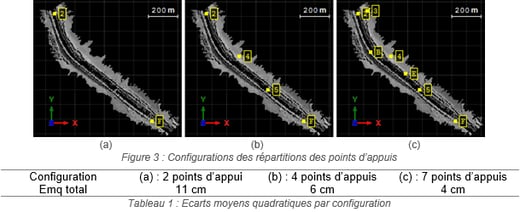
Afin d’optimiser le temps des interventions terrain et la qualité des livrables, une étude sur le nombre de points de calage a été menée. Comme le montre la Figure 3, nous avons fait varier le nombre des points d’appui et déterminé l’exactitude du nuage pour chaque configuration. Les écarts moyens quadratiques calculés à partir des pointés sur les points de contrôle apparaissent dans le Tableau 1.
Ces résultats ont été obtenus sur une zone de faible densité de points. Une étude complémentaire de pointé montre que plus la densité de points est importante meilleure est la précision du pointé des points d’appuis, et donc meilleure sera la précision absolue du nuage. Ainsi, pour des acquisitions précises, on privilégiera la présence d’un grand nombre de points d’appui (tous les 500 mètres), où des acquisitions de haute densité.
En définitive, cette étude nous a permis de montrer que selon le protocole terrain, la précision absolue du nuage sera comprise entre 2 et 10 centimètres, et est suffisante pour la cartographie du risque végétation.
2. Classification de données LiDAR
La localisation du risque végétation implique la connaissance de la position du couvert végétal et des infrastructures. Pour détecter et dissocier ces éléments, une classification des nuages LiDAR est nécessaire.
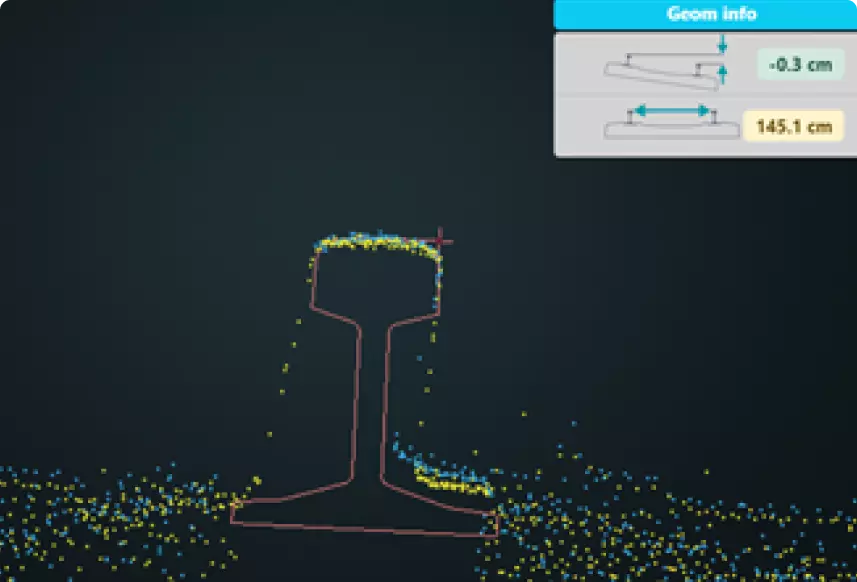
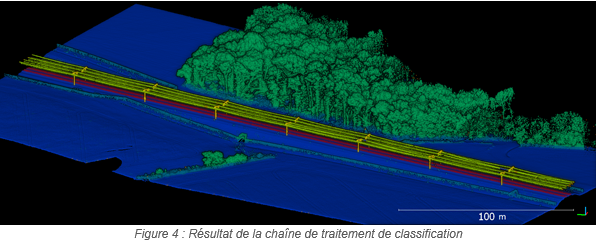
Une chaîne de traitement de classification non supervisée a donc été mise en œuvre par édition de macros concaténant différents outils et fonctions proposés par le logiciel TerraScan. Le processus mis en place permet la classification semi-automatique du sol, de la basse végétation (inférieure à 2m), de la haute végétation (supérieure à 2m), des rails, des fils et poteaux caténaires, ainsi que des points isolés (voir Figure 4).
 La littérature distingue deux principaux critères pour analyser une classification automatique : son efficacité (relative aux temps de traitements homme et machine), et son exactitude (coefficient kappa). Cependant, pour déterminer l’exactitude d’un nuage, il est nécessaire de le comparer à une donnée de référence considérée comme exacte. Confrontés à une classification manuelle et minutieuse, les résultats de notre chaîne de traitement sont fournis dans le Tableau 2 (étude réalisée sur un nuage de 8 millions de points répartis sur un linéaire de 250 mètres) :
La littérature distingue deux principaux critères pour analyser une classification automatique : son efficacité (relative aux temps de traitements homme et machine), et son exactitude (coefficient kappa). Cependant, pour déterminer l’exactitude d’un nuage, il est nécessaire de le comparer à une donnée de référence considérée comme exacte. Confrontés à une classification manuelle et minutieuse, les résultats de notre chaîne de traitement sont fournis dans le Tableau 2 (étude réalisée sur un nuage de 8 millions de points répartis sur un linéaire de 250 mètres) :
 Les performances atteintes, tant en termes d’exactitude que de rapidité de traitements, ont permis l’intégration de la chaîne développée aux processus de production du Pôle Drones. La solution est déployable à grande échelle. Sur la base de cette classification, l’étude du risque végétation a pu être entreprise.
Les performances atteintes, tant en termes d’exactitude que de rapidité de traitements, ont permis l’intégration de la chaîne développée aux processus de production du Pôle Drones. La solution est déployable à grande échelle. Sur la base de cette classification, l’étude du risque végétation a pu être entreprise.
3. Analyse du risque végétation
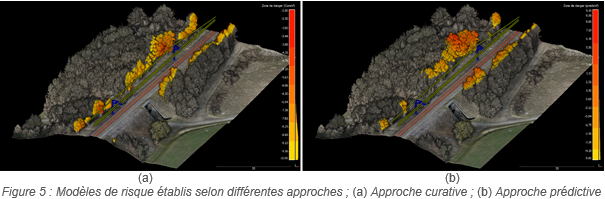
Les spécialistes végétation SNCF Réseau définissent principalement le risque végétation comme un danger immédiat pour les infrastructures. Dans notre analyse, nous avons approfondi le modèle en proposant une approche par imminence du risque. Nous pouvons dès lors distinguer trois types d’approches définissant la végétation dangereuse :
- L’approche curative, délimitant une bande de proximité de 3 mètres à partir des infrastructures ferroviaires : identification d’un danger immédiat.
- L’approche préventive, visant à détecter toute végétation susceptible d’impacter les infrastructures lors d’une chute : identification du risque à court terme
- L’approche prédictive, qui pondère de façon probabiliste la précédente approche au regard du profil du terrain (déblais, remblais, inclinaison des pentes, etc.) : identification d’un risque potentiel (occurrence de risque plus faible)
Afin de conserver en permanence une visualisation complète des données, nous avons fait le choix de traiter la donnée sous sa forme tridimensionnelle. Nos chaînes de traitements permettent ainsi la création d’un attribut à tout point de la végétation du nuage, quantifiant le niveau de danger vis-à-vis des infrastructures selon l’approche choisie : curative, préventive ou prédictive (Figure 5).
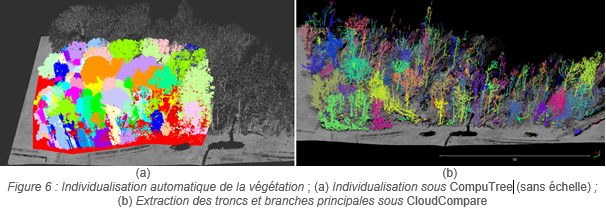
 Dans le but de cartographier le risque végétation à grande échelle (dizaines ou centaines de kilomètres), nos chaînes de traitements ont été conçues pour être applicables à des données spatialement ré-échantillonnées ; les traitements sont donc rapides et scalables.La limite des modèles réalisés réside dans le fait que l’entité de référence demeure le point du nuage et non pas l’« individu » (arbre, branche, etc.). Nous nous sommes donc tournés vers des solutions d’individualisation et une caractérisation de la végétation (voir Figure 6). Relativement complexes à établir de façon automatique et robuste, ces travaux sont encore dans leur phase expérimentale à la date de rédaction du présent résumé. Ceux-ci devraient permettre à terme de caractériser les dangers arbre par arbre, en intégrant des données dendrométriques (hauteur de l’arbre, taille du tronc, direction de poussée, etc.). Ces travaux permettront aux métiers d’optimiser les processus de maintenance (définition des moyens d’élagage, etc.) et de réduire les coûts d’intervention tout en éliminant le risque végétation.
Dans le but de cartographier le risque végétation à grande échelle (dizaines ou centaines de kilomètres), nos chaînes de traitements ont été conçues pour être applicables à des données spatialement ré-échantillonnées ; les traitements sont donc rapides et scalables.La limite des modèles réalisés réside dans le fait que l’entité de référence demeure le point du nuage et non pas l’« individu » (arbre, branche, etc.). Nous nous sommes donc tournés vers des solutions d’individualisation et une caractérisation de la végétation (voir Figure 6). Relativement complexes à établir de façon automatique et robuste, ces travaux sont encore dans leur phase expérimentale à la date de rédaction du présent résumé. Ceux-ci devraient permettre à terme de caractériser les dangers arbre par arbre, en intégrant des données dendrométriques (hauteur de l’arbre, taille du tronc, direction de poussée, etc.). Ces travaux permettront aux métiers d’optimiser les processus de maintenance (définition des moyens d’élagage, etc.) et de réduire les coûts d’intervention tout en éliminant le risque végétation.
 Conclusion
Conclusion
Les travaux menés nous ont tout d’abord permis de quantifier précision et exactitude des données issues du système LiDAR VUX1-UAV. La chaîne de traitements de ces données a été affinée, et les protocoles terrain optimisés. La qualité des données du système LiDAR permet de répondre aux exigences de surveillance et de maintenance du RFN, repoussant les limites des méthodes photogrammétriques. Dans le but de cartographier le couvert végétal, une chaîne de classification des données a également été établie et intégrée aux processus de traitements, et est désormais déployable efficacement à grande échelle. Les objectifs de cartographie du risque végétation ont été atteints : les travaux permettent de détecter automatiquement sur de grands linéaires la présence de tout risque végétal. Cette cartographie va permettre la création automatisée de fiches signalétiques de danger végétation, qui seront utilisées par les équipes de maintenance terrain garantissant gains économiques et meilleure disponibilité du Réseau Ferré National.